【泡泡一分钟】针对带有外点的三角测量的拟凸平面扫描(ICCV2017-96)
每天一分钟,带你读遍机器人顶级会议文章
标题:Quasiconvex Plane Sweep for Triangulation with Outliers
作者:Qianggong Zhang, Tat-Jun Chin, David Suter
来源:ICCV 2017 ( IEEE International Conference on Computer Vision)
编译:张建
审核:陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

三角测量是三维计算机视觉中的一项基本任务。令人并不感到意外的是,它是一个被研究的很深入的问题,并且已经有了很多成熟的算法。
然而,在存在严重不正确测量(即外点)的情况下,为了产生正确结果所必需的鲁棒的三角测量算法,受到的关注较少。在三角测量中处理外点的默认方法是随机采样。这种随机的启发式不仅仅是次优的,事实上,在大规模数据集上它的计算效率可能很低。
在本文中,我们提出了一种新的针对鲁棒三角测量的局部最优算法。我们的方法的一个关键特征是通过平面扫描一组拟凸函数有效地导出局部更新步骤。支撑我们的方法是拟凸平面扫描背后的一个新理论,这在计算几何中还没有被检验过。
相对于随机抽样启发,我们的算法不仅保证了确定性地收敛到局部最小值,它通常在相似的运行时间内会实现更高质量的解决方案。
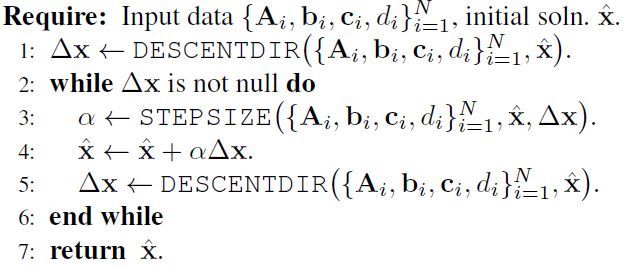
算法1:用于LMS三角测量的Q扫描法。
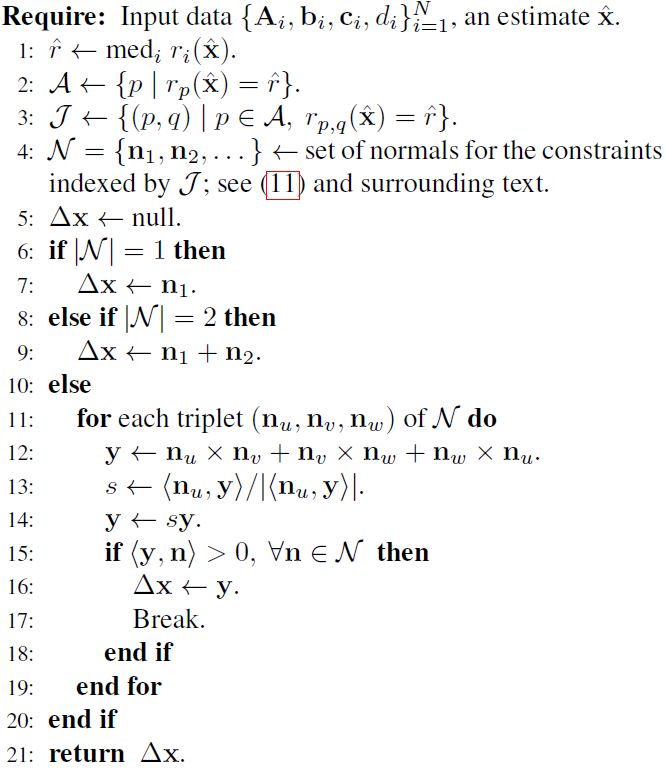
算法2:用于寻找下降方向的DESCENTDIR。
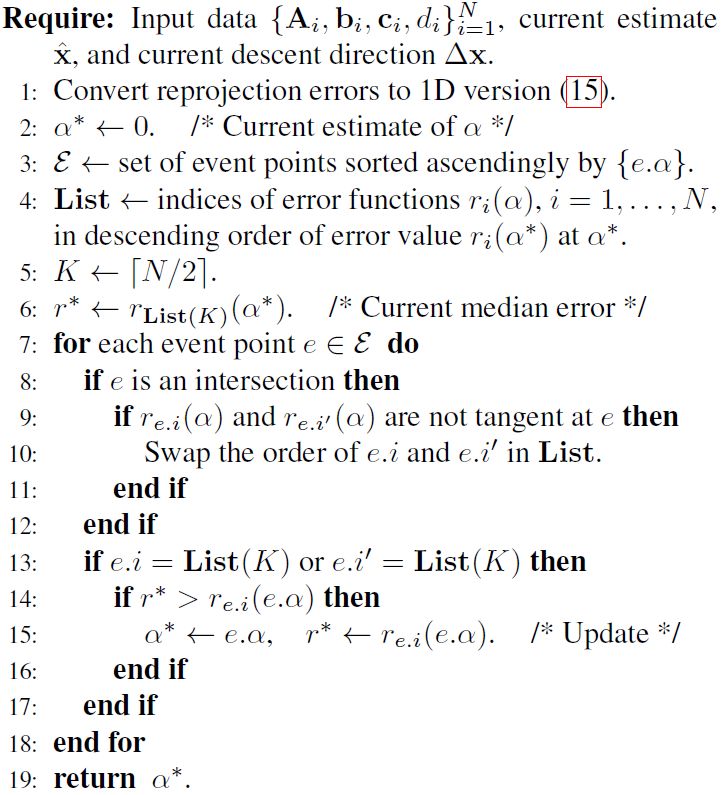
算法3:用于优化步长的STEPSIZE。
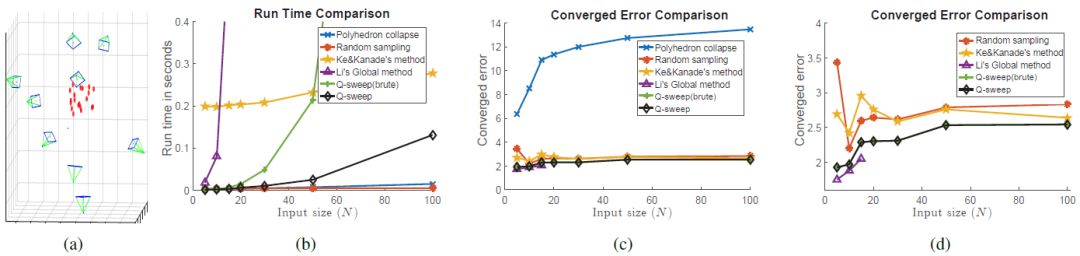
图1:(a)具有20个场景点和N=9个摄像机的合成数据集。(b)对合成三角测量的所有算法的平均运行时间与输入大小n作图。(c)所有方法的平均收敛误差。(d)与(c)相同,但没有多面体折叠。
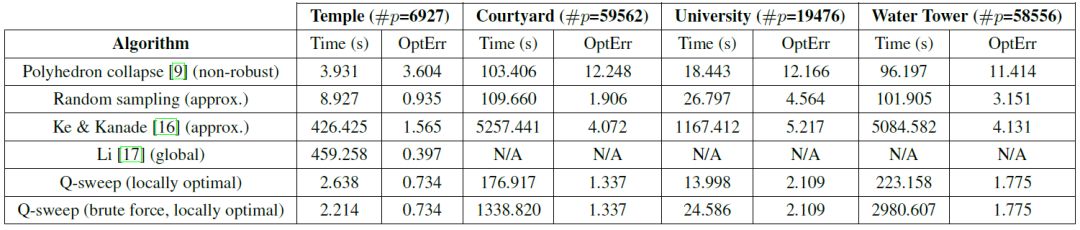
表1:真实数据集的结果。#p:数据集中的三角测量实例的总数。Time:用于求解所有三角测量实例的总运行时间(如果2小时未完成则为N/A);OptErr:在所有实例中以像素为单位的平均收敛重投影误差。

Abstract
Triangulation is a fundamental task in 3D computer vision. Unsurprisingly, it is a well-investigated problem with many mature algorithms. However, algorithms for robust triangulation, which are necessary to produce correct results in the presence of egregiously incorrect measurements(i.e., outliers), have received much less attention. The default approach to deal with outliers in triangulation is by random sampling. The randomized heuristic is not only suboptimal, it could, in fact, be computationally inefficient on large-scale datasets. In this paper, we propose a novel locally optimal algorithm for robust triangulation. A key feature of our method is to efficiently derive the local update step by plane sweeping a set of quasiconvex functions. Underpinning our method is a new theory behind quasiconvex plane sweep, which has not been examined previously in computational geometry. Relative to the random sampling heuristic, our algorithm not only guarantees deterministic convergence to a local minimum, it typically achieves higher quality solutions in similar runtimes.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘链接:
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com