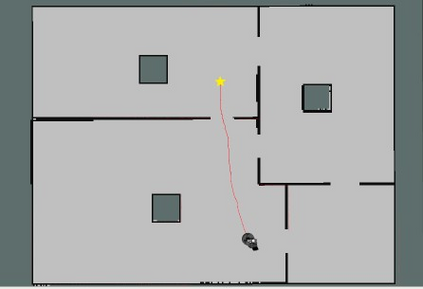
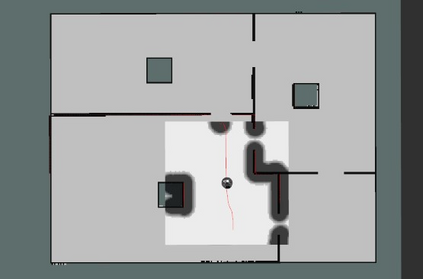
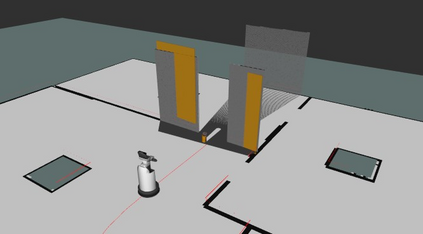
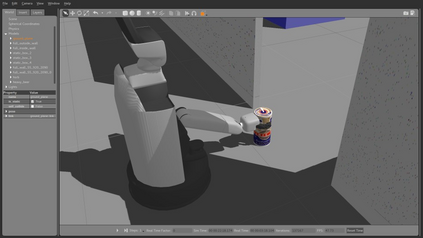
Avoiding obstacles in the perceived world has been the classical approach to autonomous mobile robot navigation. However, this usually leads to unnatural and inefficient motions that significantly differ from the way humans move in tight and dynamic spaces, as we do not refrain interacting with the environment around us when necessary. Inspired by this observation, we propose a framework for autonomous robot navigation among movable obstacles (NAMO) that is based on the theory of affordances and contact-implicit motion planning. We consider a realistic scenario in which a mobile service robot negotiates unknown obstacles in the environment while navigating to a goal state. An affordance extraction procedure is performed for novel obstacles to detect their movability, and a contact-implicit trajectory optimization method is used to enable the robot to interact with movable obstacles to improve the task performance or to complete an otherwise infeasible task. We demonstrate the performance of the proposed framework by hardware experiments with Toyota's Human Support Robot.
翻译:然而,这通常会导致与人类在紧凑和动态空间中移动的方式大不相同的非自然和低效动作,因为我们在必要的时候不回避与周围环境的相互作用。受这一观察的启发,我们提议了一个在移动障碍之间自主机器人导航的框架,该框架以支付能力和接触不便运动规划理论为基础。我们考虑了一种现实的情景,即移动服务机器人在向目标状态航行时,在环境中谈判未知障碍。对探测其可移动性的新障碍采取了廉价提取程序,并使用了接触不易的轨道优化方法,使机器人能够与移动障碍进行互动,以改进任务性能或完成一项否则不可行的任务。我们用丰田人类支持机器人进行硬件实验,展示了拟议框架的绩效。