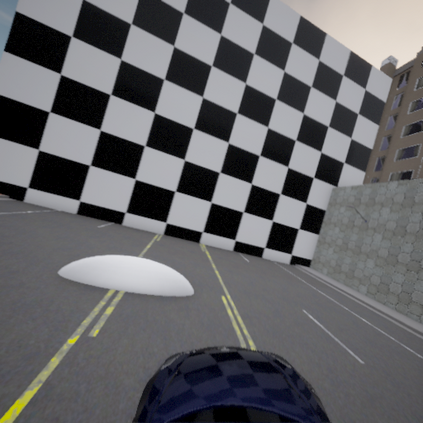
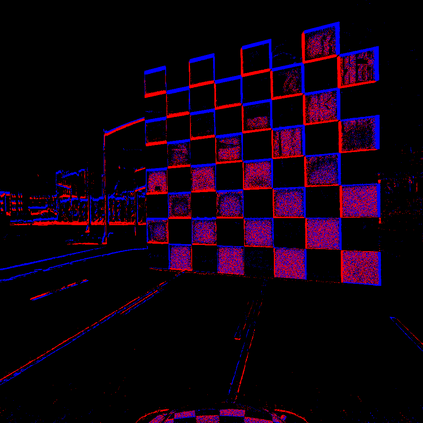
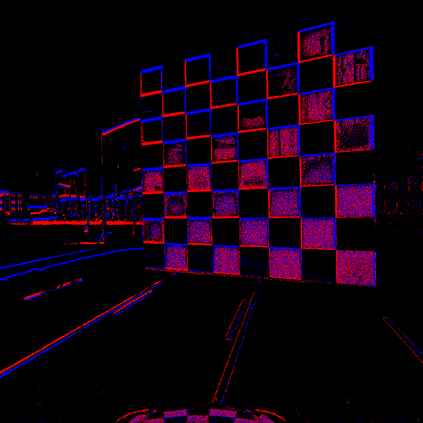
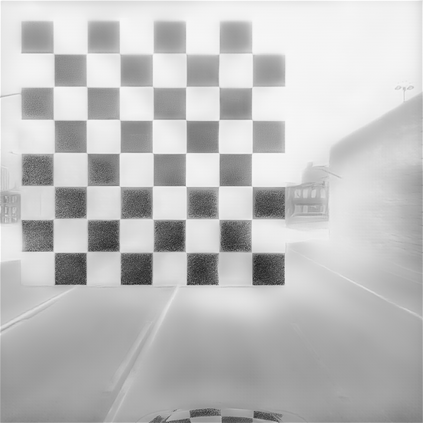
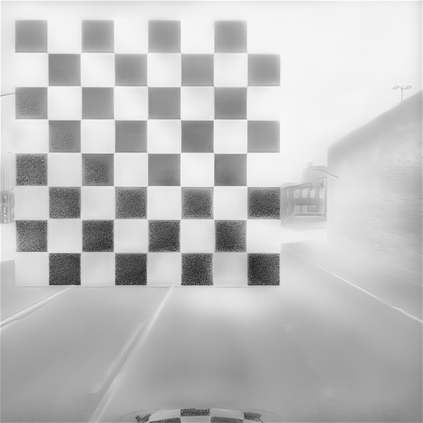
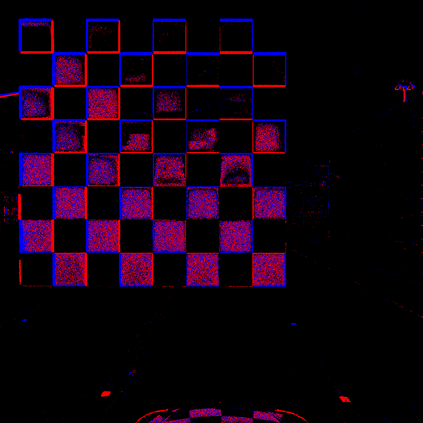
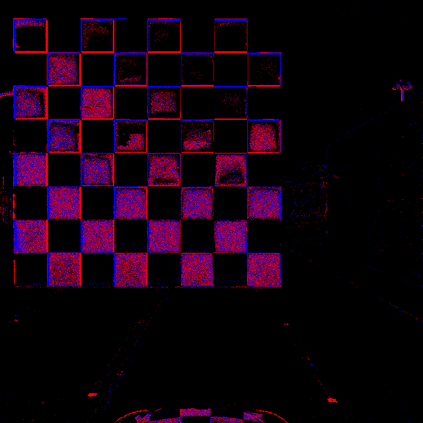
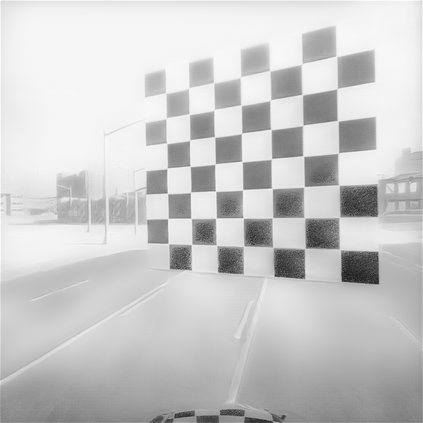
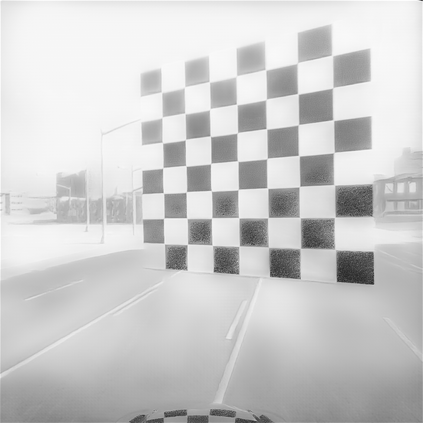
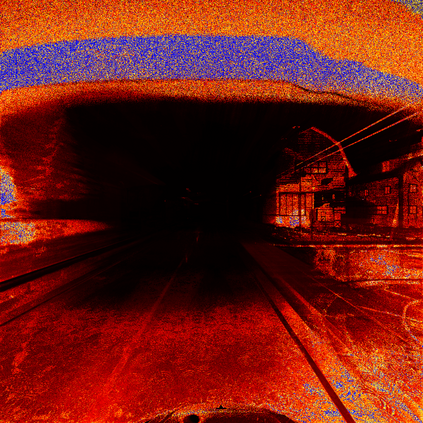
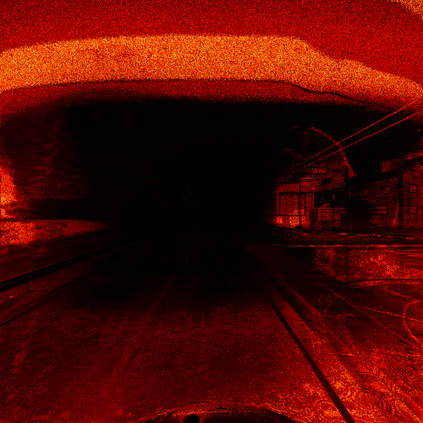
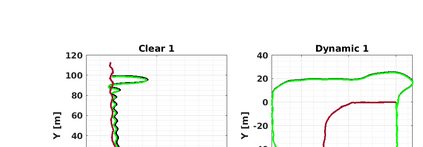
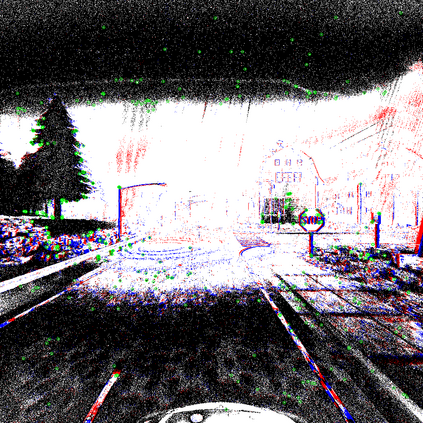
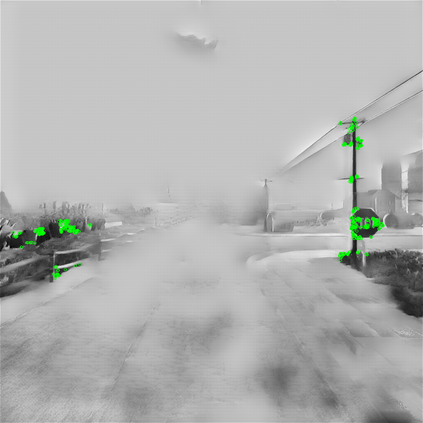
The development process of high-fidelity SLAM systems depends on their validation upon reliable datasets. Towards this goal, we propose IBISCape, a simulated benchmark that includes data synchronization and acquisition APIs for telemetry from heterogeneous sensors: stereo-RGB/DVS, Depth, IMU, and GPS, along with the ground truth scene segmentation and vehicle ego-motion. Our benchmark is built upon the CARLA simulator, whose back-end is the Unreal Engine rendering a high dynamic scenery simulating the real world. Moreover, we offer 34 multi-modal datasets suitable for autonomous vehicles navigation, including scenarios for scene understanding evaluation like accidents, along with a wide range of frame quality based on a dynamic weather simulation class integrated with our APIs. We also introduce the first calibration targets to CARLA maps to solve the unknown distortion parameters problem of CARLA simulated DVS and RGB cameras. Finally, using IBISCape sequences, we evaluate four ORB-SLAM3 systems (monocular RGB, stereo RGB, Stereo Visual Inertial (SVI), and RGB-D) performance and BASALT Visual-Inertial Odometry (VIO) system on various sequences collected in simulated large-scale dynamic environments. Keywords: benchmark, multi-modal, datasets, Odometry, Calibration, DVS, SLAM
翻译:为实现这一目标,我们建议IBIS Cape,这是一个模拟基准,包括数据同步和获取的APIS,用于从不同传感器进行遥测:立体-RGB/DVS、深度、IMU和GPS,以及地面真相现场分解和车辆自我感动。我们的基准以CARLA模拟器为基础,其后端是不真实的引擎,以产生高动态场景模拟真实世界。此外,我们提供34个适合自主车辆导航的多式数据集,包括像事故一样的现场理解评价情景,以及基于与我们API结合的动态气象模拟类的广泛框架质量。我们还向CARLA地图引入了第一个校准目标,以解决CARLA模拟DVS和RGB相机的未知扭曲参数问题。最后,我们使用IMISCASCA的序列,我们评估了四种ORB-SAM3系统(离线RGB、立体RGB、Stereopio Indocial-Ial、AVAL-DSA-SAL-S-Ial-DKSAL-D KIal DSA、SAL-DSAL-DSAL-DSA、A-SAL-SAL-DK-SAL-SAL-BSBSAL-BS-BSBS-S-BSBSBSBSBS-S-S-SB-S-SBSBSBS-CS-S-S-S-CS-CSBSBSBS-SBSBSBSBSBSBS、A、A、A、A、A、A、A、A、A、A、A、A、A、A、A、A、A、A、AD-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-S-