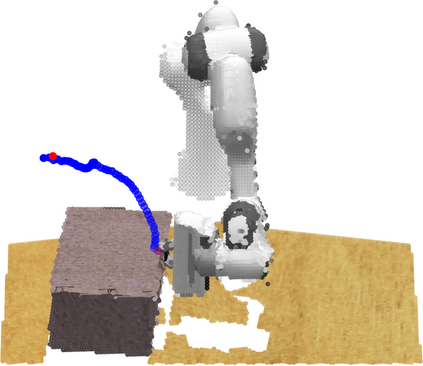
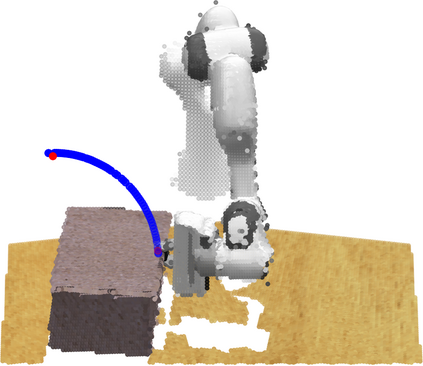
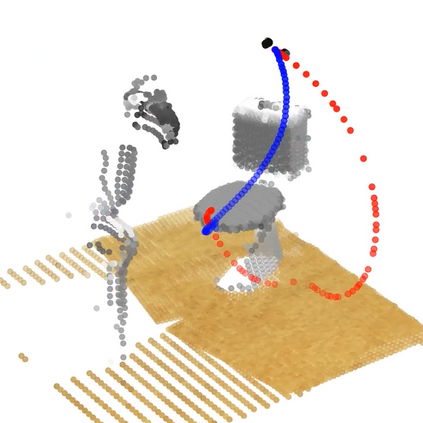
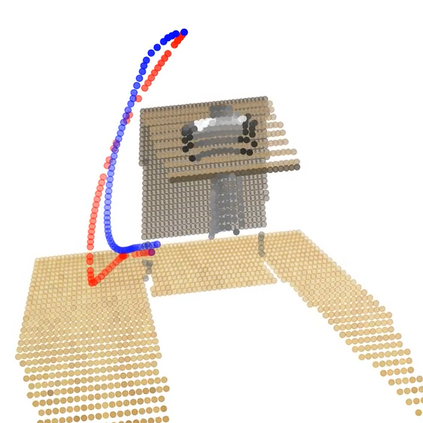
This paper introduces Hierarchical Diffusion Policy (HDP), a hierarchical agent for multi-task robotic manipulation. HDP factorises a manipulation policy into a hierarchical structure: a high-level task-planning agent which predicts a distant next-best end-effector pose (NBP), and a low-level goal-conditioned diffusion policy which generates optimal motion trajectories. The factorised policy representation allows HDP to tackle both long-horizon task planning while generating fine-grained low-level actions. To generate context-aware motion trajectories while satisfying robot kinematics constraints, we present a novel kinematics-aware goal-conditioned control agent, Robot Kinematics Diffuser (RK-Diffuser). Specifically, RK-Diffuser learns to generate both the end-effector pose and joint position trajectories, and distill the accurate but kinematics-unaware end-effector pose diffuser to the kinematics-aware but less accurate joint position diffuser via differentiable kinematics. Empirically, we show that HDP achieves a significantly higher success rate than the state-of-the-art methods in both simulation and real-world.
翻译:暂无翻译