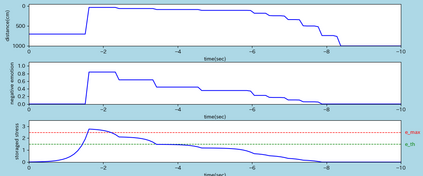
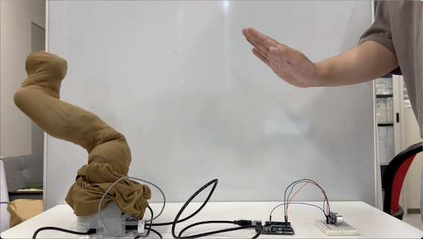
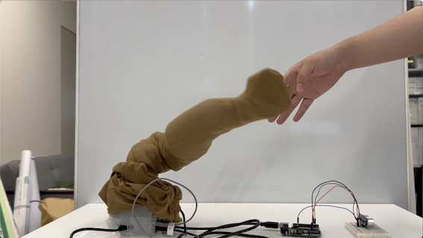
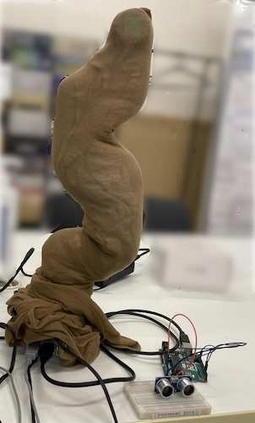
Human-robot interaction frequently involves physical proximity or contact. In human-human settings, people flexibly accept, reject, or tolerate such approaches depending on the relationship and context. We explore the design of a robot's rejective internal state and corresponding avoidance behaviors, such as withdrawing or pushing away, when a person approaches. We model the accumulation and decay of discomfort as a function of interpersonal distance, and implement tolerance (endurance) and limit-exceeding avoidance driven by the Dominance axis of the PAD affect model. The behaviors and their intensities are realized on an arm robot. Results illustrate a coherent pipeline from internal state parameters to graded endurance motions and, once a limit is crossed, to avoidance actions.
翻译:暂无翻译