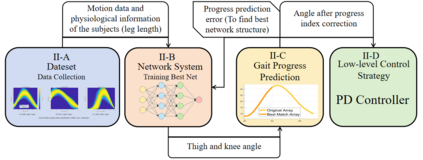
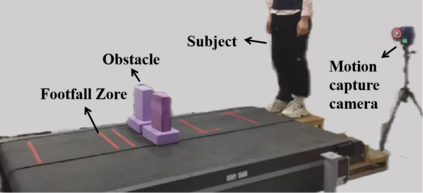
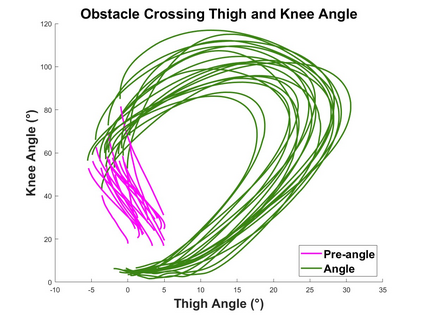
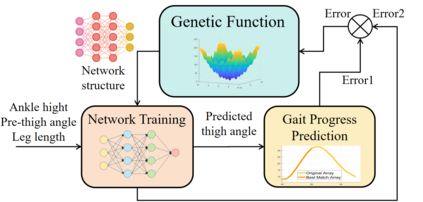
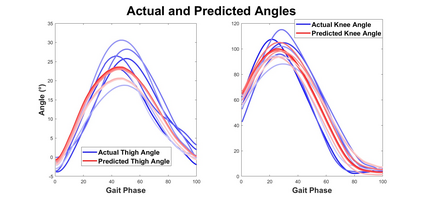
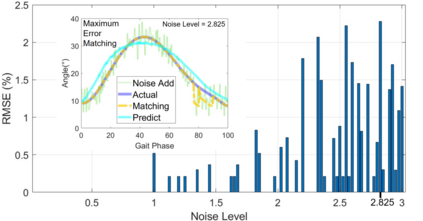
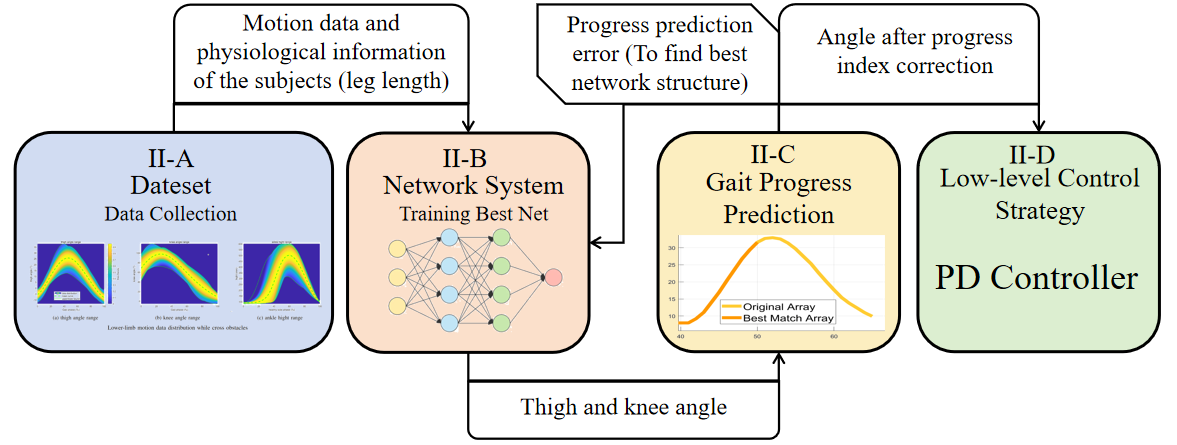
For amputees with powered transfemoral prosthetics, navigating obstacles or complex terrain remains challenging. This study addresses this issue by using an inertial sensor on the sound ankle to guide obstacle-crossing movements. A genetic algorithm computes the optimal neural network structure to predict the required angles of the thigh and knee joints. A gait progression prediction algorithm determines the actuation angle index for the prosthetic knee motor, ultimately defining the necessary thigh and knee angles and gait progression. Results show that when the standard deviation of Gaussian noise added to the thigh angle data is less than 1, the method can effectively eliminate noise interference, achieving 100\% accuracy in gait phase estimation under 150 Hz, with thigh angle prediction error being 8.71\% and knee angle prediction error being 6.78\%. These findings demonstrate the method's ability to accurately predict gait progression and joint angles, offering significant practical value for obstacle negotiation in powered transfemoral prosthetics.
翻译:暂无翻译