
近十年来,无人机(UAV)在军事对抗、灾害管理、气象监测及物流配送等领域的应用持续深化。随着无人机从受控环境转向真实场景,外源性及内源性"不确定性"因素深刻影响其任务规划与决策机制。在无人机需求激增的背景下,各国政府加速完善监管体系,亟需设计能高效管控空域交通的"监视安防系统",尤其在管制空域。基于此背景,本论文聚焦空域安全问题,在不确定环境下提供兼顾"目标捕获"与"碰撞规避"的安全规划解决方案。
本文首先提出多智能体协同捕获目标的空域安防策略。针对"多追捕者-多逃逸者"问题的计算复杂性,采用基于博弈几何特征的启发式算法,开发计算高效的任务分配机制。研究从双追捕者单逃逸者模型切入,通过解析最优追捕策略推导出独立于逃逸策略的"动态分配算法"。该算法进一步扩展至任意数量、异速智能体的多追捕多逃逸场景,实现追捕方协同作战效能最大化。
随后引入随机干扰因素,运用"前向可达性分析"与"协方差控制"理论解析随机流场中的追逃博弈。首次在约束博弈框架下研究对抗场景中的"高斯分布导向"问题,通过迭代技术数值求解协方差控制方程。所提方法成功应用于导弹"末段制导"场景,并延伸至外源随机流场追逃博弈:基于线性反馈控制策略,在参与者标称解空间构建"机会约束协方差博弈"模型。线性/非线性流场仿真验证表明,追捕方可有效引导博弈趋向捕获状态。
最终聚焦参数化不确定性研究。首先构建参数不确定条件下的最优控制框架,引入"敏感度函数"与"共态变量"技术增强参数扰动鲁棒性。利用敏感度函数解决含"动态障碍物"(运动模型不确定)环境的安全路径规划问题,进而将该方法扩展至类"战争迷雾"态势的博弈论建模。
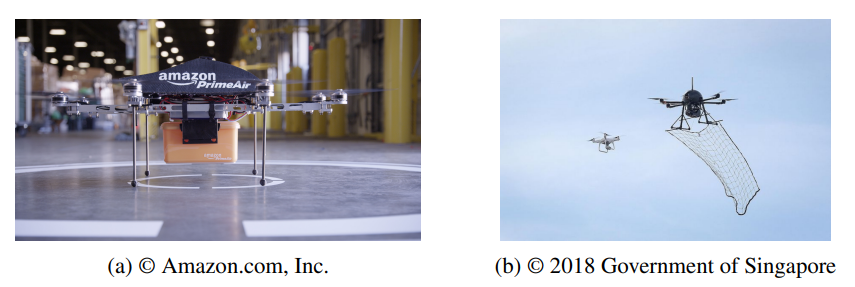
图1.1:(a)"极速航空"是亚马逊开发的未来物流系统,通过无人机(UAV)在30分钟内将包裹安全送达客户;(b)无人机拦截器追踪侵入管制空域的无人机,使用抓捕网实施捕获。基于多无人机协同的反无人机技术,是构建未来智能空基平台的解决方案之一。

