
无人机编队飞行代表了自主防御与安全作战的一项关键进展。该能力已在诸如UAV Navigation–Grupo Oesía公司的“VECTOR飞行控制系统(VECTOR Flight Control Systems)”等系统中实现,使得多架无人飞行器能够在飞行中基于“长机”与“僚机”逻辑保持精确的相对位置。
自军事航空的早期阶段起,多机编队飞行就一直是一项基本技术,能带来明显的作战优势。其中最相关的优势包括相互防御、减轻飞行员工作负荷以及简化战术协同。这些好处共同提高了空中作战的效能、安全性和凝聚力,使飞行中队在战场上更具杀伤力和韧性。
对于无人飞行器(UAV)而言,由于没有机上飞行员以及来自地面控制站(GCS)的集中指挥,其中一些优势并不直接适用。然而,新的挑战与机遇使得编队飞行在现代战斗场景中成为一项特别有价值的能力。有些应用需要大量无人机进行同步飞行。一个突出的例子是协调的巡飞弹攻击,旨在饱和敌方防空系统。在此类场景中,管理多架飞行器会给操作员带来高昂的工作负荷[1]。为缓解此问题,需采用如“编队”这样的抽象指令,从而将多架无人机视为一个单一的战术单元。因此,自主编队飞行能力是不可或缺的。
类似地,协同导航[2](即无人机实时共享其位置、传感器数据、轨迹和环境条件)需要先进的编队飞行技术。这种协作显著提高了任务效能和安全性,尤其是在对抗环境中。这些能力正是“未来作战空中系统”(FCAS)计划的支柱之一,该计划设想有人驾驶飞机与“远程载机”(Remote Carrier)无人机在协调飞行中联合作战。在此背景下,编队飞行成为分布式、自适应且有韧性的空中作战的关键能力。
为使该能力可行,必须克服一系列技术挑战,如下所述。
精确的定位、导航与授时(PNT)解决方案:为实现密集编队飞行,需要精确的定位解决方案。该方案可提供绝对精度,或仅提供相对于编队中其他飞行器的相对定位。PNT解决方案的完好性以及信息的同步性是保持在编队中位置的关键。
编队内通信(Intra-formation Communications):编队飞行的主要弱点之一是飞行器与地面控制站(GCS)之间通信链路的丢失,这可能导致编队解散。为降低此风险,建议在飞行器间建立直接通信信道,使其能实时共享状态向量和意图。或者,可采用非合作定位方法,基于机载传感器(如摄像头或雷达系统),使每架无人机无需数据交换即可估算其他无人机的相对位置。
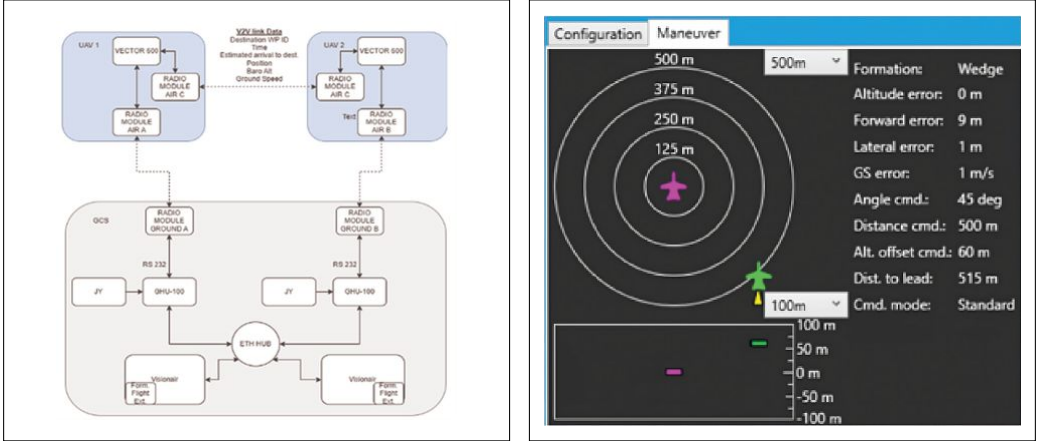
图1(a)双机编队飞行的系统架构。(b)编队飞行控制菜单。

图2(a)初始编队接近。(b)编队飞行。
相对制导与控制(Relative Guidance and Control):制导与控制系统必须专门设计为在相对模式下运行,考虑四维(4D)轨迹(位置和时间)。这既包括跟随相对于长机的位置,也包括在指定汇合点同步加入编队的精确协同[3]。
飞行包线保护(Operational Envelope Protection):每架飞行器必须遵守其自身的动态限制以及其他编队成员的动态限制,并根据其相对位置调整其飞行包线。这种安全区域的管理确保了编队的完整性并防止碰撞,即使在动态机动或构型变化期间也是如此。
协同应急机动(Coordinated Emergency Maneuvers):系统必须包含在编队飞行期间发生严重故障时的同步规避程序。主要目标是通过协同机动保证飞行器之间快速、安全地分离,保护编队免受失控、传感器故障或导航错误的影响。
本文介绍了由UAV Navigation–Grupo Oesía开发的解决方案,以实现此类任务的执行。文章详细说明了为解决技术挑战而设计的不同实施方案,并在最后对飞行验证测试中获得的结果进行了讨论。
材料与方法
由UAV Navigation–Grupo Oesía开发的解决方案基于一种协作通信架构。飞行器通过专用的车对车(V2V)通信网络共享其位置和意图信息。得益于该架构,一旦发出进入编队的初始指令,系统即可自主运行,即使在与地面控制站(GCS)链路中断的情况下也能保持编队。系统的功能架构如图1.a所示。
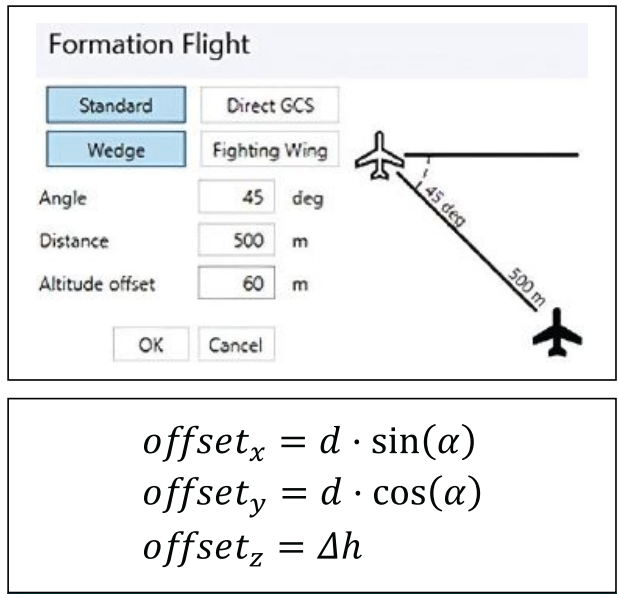
图3(a)楔形队形命令窗口 (b)编队偏移量计算
操作员可通过专用界面选择并激活不同的编队类型,例如“楔形(wedge)”或“作战机翼(fighting wing)”。该界面还可通过可视化菜单(图1.b)监控飞行器行为,从而增强操作员的态势感知能力。从那时起,VECTOR FCS飞行控制系统(FCS)自主管理编队的汇合与保持,显著降低了操作员的工作负荷。一旦接收到加入编队的命令,FCS会协调到达长机当前位置的时间,并根据选定的编队参数应用横向和时间偏移(图2.a)。该飞行逻辑的细节可在UAV Navigation-Grupo Oesía的其他文献[3]中找到。当无人机到达其指定位置时,系统评估是否满足开始协同飞行的条件(图2.b)。如果满足,飞行器开始相对于长机的历史位置进行导航。在此模式下,无人机跟随已存储的长机历史位置。例如,在楔形队形情况下(图3.a),输入参数包括高度偏移、编队角度和机间距离(图3)。长机的位置存储在一个环形缓冲区中,并根据指令的机间间隔,使用一个时间偏移量(公式1)进行计算。此外,对长机位置应用横向和垂直偏移。

为保持在编队中的位置,飞行器的速度控制(公式2)接收一个根据飞行器位置与编队中目标位置之间的纵向误差计算出的指令。此外,在生成僚机相对于长机的速度指令时,会考虑横向和垂直偏移以及长机的角速度,以补偿轨迹差异。

飞行期间,为每架无人机(UAV)定义了三维安全区。如果其中一架无人机因导航错误或系统故障而超出这些限制,则会触发自动规避机动。该机动包括使航向偏离编队外侧30°并爬升100米,确保与编队其他成员安全分离。此外,每架无人机持续监控其关键系统的状态(健康监控)。如果它检测到自身不再满足保持在编队中的最低要求,则会通知其余飞行器,并执行自主、协同的脱离程序。

图4(a)实际飞行中的初始编队接近。(b)实际编队,包括编队内的长机更换。
结果与讨论
为验证编队飞行机动,进行了仿真和实际飞行测试。在第一阶段,使用了由UAV Navigation–Grupo Oesía开发的硬件在环(HIL)环境,从而可以在不同编队配置、导航条件和链路丢失情况下验证系统行为。随后,使用真实无人机进行的飞行测试分两个阶段进行。第一阶段使用质量低于25公斤、速度小于30米/秒的轻型平台,目标是验证控制逻辑、编队进入和脱离机动以及安全系统。在成功验证后,在一个具有代表性的作战环境(技术就绪等级TRL 7)下进行了测试,使用了最大起飞重量(MTOW)高达150公斤、飞行速度接近0.5马赫的高性能无人机。这些测试在INTA-CEDEA(阿雷尼西约测试中心)进行,为在真实条件下进行验证提供了一个受控且安全的环境。在这些测试中,确认了系统即使在动态机动和长机更换期间也能保持稳定编队的能力。观察到了功能正常的编队,其机间最小间隔小于200米,具体取决于平台的速度和机动性。这些结果证明了以安全、自主、稳健的方式在密集编队中操作多架无人机的可行性,并将该系统验证为一种适用于真实防御环境的作战能力。
结论
由UAV Navigation–Grupo Oesía开发的系统已被证明是一种安全、高效、可用于实战的无人机编队飞行解决方案。进行的仿真和实际飞行测试验证了其在各种场景下的功能,包括动态操作、长机更换和应急机动。所获得的结果证实了在真实防御任务中运用此能力的可行性,它能够以自主方式实现多无人机间的精确协同,同时显著降低操作员工作负荷。作为未来的发展方向,该系统旨在增强在电磁降级或对抗环境中的稳健性,探索更不易受干扰的替代性机间通信方法,例如自由空间激光链路。此外,将研究引入基于计算机视觉的非合作相对导航方法,以确保在通信完全中断时的可操作性。
