为自主机器人与车辆设计感知系统需要在传感器性能与成本、复杂性及集成约束之间进行权衡。本论文介绍GO4R(机器人感知系统架构生成与优化),一个多目标框架,该框架联合优化传感器选择与布局,以权衡基于体积的熵效用度量H(-)和货币成本M($)。感知熵H被形式化为一个跨体素化关注区域(ROI)的不确定性体积度量,它自然地奖励鲁棒传感器融合与校准所需的覆盖范围、重叠和冗余。本研究实施了NSGA-II算法并采用自定义混合变量算子,以专门处理此问题中存在的连续(如传感器位姿)和离散(如传感器类型/数量)决策变量。两个案例研究——Clearpath Jackal平台上的远程户外导航和ANYmal-C平台上的短程室内导航——展示了该框架在截然不同的关注区域定义和操作条件下生成帕累托最优传感器架构的能力。在Jackal研究中,GO4R收敛到一个包含11个新颖的帕累托最优设计的种群,并揭示了对体素大小和重要性加权的敏感性。在ANYmal-C研究中,紧凑、均匀加权的关注区域产生了一个更平坦的帕累托前沿,包含25个帕累托最优设计,并强调了当基线覆盖已较高时,传感器固有参数(如角分辨率和视场)如何主导设计权衡。关键架构决策被逐一分析,通过其对帕累托前沿形状的影响进行量化,并按照GO4R方法排序以依次降低不确定性。由此产生的指导原则为从业者提供了一个严格的、可重复的过程,用于根据特定任务需求定制感知系统。最后,GO4R提供了一个公开可用的NVIDIA Isaac Sim扩展,以帮助从业者遵循GO4R方法,无论其自主应用为何。未来工作将把GO4R扩展到动态环境,提高生成设计的保真度,并纳入额外成本度量,如计算负载和可维护性。
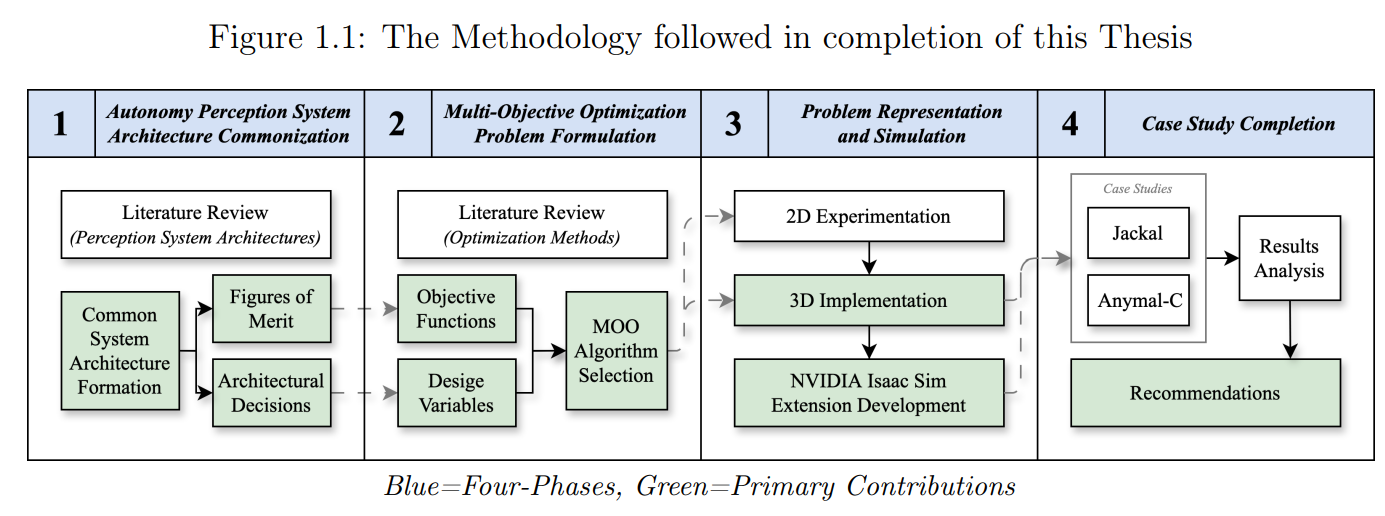
第1章提供了该主题的介绍性背景,讨论了研究背后的动机,并提出了构建本论文基础的目标。第2章通过探索当前行业和学术实践、提出一个可扩展的感知系统架构、识别关键性能指标和架构决策,并开始将感知系统设计表述为一个多目标优化问题,从而缩小了研究问题范围。第3章讨论了现有文献和本论文中用于“求解”该优化问题的方法,并细化了第2章中的多目标优化表述。第4章讨论了将GO4R框架和方法应用于两个实际案例的结果,验证了论文的论点。第5章对本论文进行了总结,回顾了研究目标,直接回答了研究问题,总结了对该领域的主要贡献,并提出了未来的工作机会。