
美国国防高级研究计划局地下挑战赛是一项为期多年的竞赛性倡议,旨在启发和塑造野战机器人的未来,特别是在推进用于复杂地下环境运行的集成技术方面。它汇聚了全球的机器人学研究人员和创新者,在实体和模拟比赛中竞争,凸显了激励和获取高技术价值成果与洞见以指导未来进展的重要机遇。本文捕捉并量化了这些成果,提取了相关见解,并总结了经验教训,为后续工作提供了建议。
地下环境推动了多项利用机器人技术进步以提升科学和安全任务效能的工作,尽管这些工作往往在范围或应用上受限。此类工作常与搜救任务相关,并阐明了需要克服的诸多技术挑战。美国国防高级研究计划局地下挑战赛,作为一项从2018年持续至2021年的竞赛性倡议,代表了这些组件技术成果在显著成熟后的融合与成功集成。它汇聚了全球的机器人学研究人员和创新者,在实体和模拟比赛中竞争,凸显了激励和获取高技术价值技术成果与洞见以指导进一步进展的重要机遇,旨在启发并帮助塑造野战机器人的未来。除了机器人学研究,地下挑战赛还反映了具体且精心设计的元素,这些元素直接源于作战相关问题以及与相关利益攸关方的接触。这些应用启发了比赛结构中内置的指标、形式和约束。明确纳入的考量包括:几何结构、环境条件类型、需面对和克服的潜在危险,甚至人类团队在地下必须如何训练和操作的战术、技术与程序。本文总结的成果可追溯至许多此类作战考量。本文的目的是整理地下挑战赛中各个参赛队伍和赛事的成果,并提供比赛评分标准之外的其他相关衡量标准。范围包括实物系统竞赛和虚拟竞赛,重点是其收官性的总决赛,但分析也涵盖了之前的隧道、城市和洞穴赛道赛事。主要贡献在于总结地下挑战赛参赛队伍的总体表现,并从这些技术分析中提取关键见解。本文结构如下:第2节简要概述地下挑战赛的技术基础和背景。第3节,我们直接深入评估参赛队伍的方法和表现,包括对这些结果的讨论。第4节识别并扩展了从这些分析中获得的众多见解和经验教训,随后第5节提出了持续推进并以此成功为基础的计划建议,以及结束语。
DARPA地下挑战赛概述
地下挑战赛的目标是启发和发现创新的解决方案,以在无人参与的情况下,绘制、导航和搜索复杂的地下环境,并且做得比人类更好。地下挑战赛旨在开发新颖的集成解决方案,能够绘制和导航复杂动态的地形、在严酷条件下进行感知的传感器和计算、在降级通信环境中进行分布式信息共享,以及实现延长作战时间、需人类干预最少的协同自主性。在此背景下,国防高级研究计划局对地下挑战赛的核心目标是寻找能够在地图质量、导航速度、搜索保真度和系统成本等方面,优于当前人工且费力地绘制和搜索地下环境方法的解决方案。新开发的能力将跨越四个技术重点领域,整合自主性、感知、组网和机动性技术方面的预期突破。
这些问题的多面性,为公共安全场景以及广泛的军事、学术和商业应用带来了突破性创新的需求和机遇,特别是考虑到地下环境带来的挑战在各子领域之间可能存在巨大差异。地下挑战赛旨在汇集来自不同领域的多学科团队和行业,以建立一个更广泛的研究社区,并开发这些创新的跨越式能力。参加地下挑战赛的团队的任务是设计和开发应对所有三个子领域中地下环境挑战的系统。
地下挑战赛分为两个竞赛,每个竞赛有两条赛道。实物系统竞赛的团队在具有代表性的实体地下赛道上,通过现场比赛开发和演示实物系统。这些团队专注于在真实的野外环境中推进和评估新颖的实物解决方案。虚拟竞赛的团队则利用系统、环境和地形的虚拟模型开发软件和算法,在基于模拟的赛事中竞争。
地下挑战赛的评分目标是搜索、探测并提供放置在未知地下环境中的感兴趣物体(称为“目标物”)的空间参考位置,这代表了“可操作的态势感知”。目标物包括人类幸存者模型、手机、背包、钻机、灭火器、头盔、绳索、通风口、充满气体的房间以及地下挑战赛立方体标志的3D模型。团队通过在最短时间内找到最多的目标物并将其报告回国防高级研究计划局指挥所,来获得最高分数。如果目标物类型正确且位置在5米范围内正确,则报告得一分。每支队伍有固定的报告次数,以防止误报。绘制环境地图不是评分的一部分,但团队被要求向国防高级研究计划局指挥所提供实时地图更新。这些更新允许可视化并验证团队在地形中的进展,以评估其感知和绘图能力。这项要求对团队向地面提供实时态势感知的能力提出了高要求。
在可能的情况下,我们更深入地研究了总决赛的结果,该赛事于2021年9月举行,代表了整个地下挑战赛期间技术进步的顶峰。在实物系统竞赛总决赛中,各队伍面对的赛道融合了所有三个子领域的元素,旨在评估所开发技术的多功能性。赛道被划分为三个不同的子领域,子领域之间具有多个连接和交叉点。队伍在预选赛中进行两次30分钟的运行,然后在其在奖金轮中的单次60分钟运行中评分,在此期间,队伍试图在比赛赛道内定位总共40个目标物。
对于虚拟竞赛总决赛,11个虚拟场景包括代表地下特征的合成模型和真实世界环境的模型。这些场景在不同的场景中代表了各个子领域,也包含了融合所有三个子领域元素的综合赛道。软件解决方案在每个赛道上获得三次60分钟的运行机会,以在每个世界中定位20个目标物。
如本文所示,地下挑战赛提供了一个绝佳的机会,可以从三个关键来源生成和收集数据:捕获的数据、提交的数据和提供的数据。本文所反映的分析主要基于前两个数据源。对于深入的、由竞争者进行的自我评估,我们建议读者参阅来自这些竞争者的各种出版物。这些出版物包括团队整体方法和性能的概述,以及机器人系统的深入设计与评估、地下绘图和感知方法,以及导航和自主性方法。
总决赛汇集了来自20个不同团队的300多名竞争者,其中包括8支实物系统竞赛团队和12支虚拟竞赛团队。这12支虚拟竞赛团队获得了虚拟竞赛预选赛的资格;其中9支进入了奖金轮并争夺奖金。有4支团队同时参加了实物系统竞赛和虚拟竞赛。图1显示了在总决赛奖金轮中参加一项或两项竞赛的13支队伍的名称和标志。团队由个人、初创公司、大学、研究实验室和大型公司组成,遍布11个国家和20所大学。图2说明了参赛团队如何体现了跨越广泛组织类型的合作,通过其多样化的集体经验、视角和技能增强了竞争。此外,大多数团队由地理上分散的成员组成,表明机器人学研究人员的网络日益全球化且相互关联。

图1 参加地下挑战赛总决赛奖金轮的实物系统与虚拟竞赛队伍名称及标志。
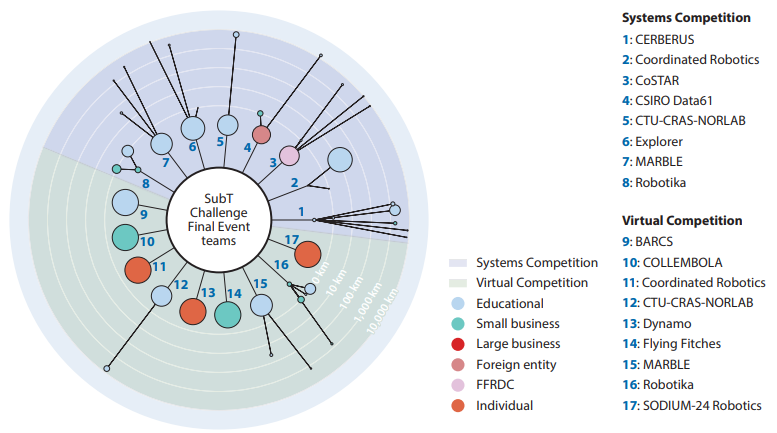
图2 地下挑战赛总决赛的竞争者格局,显示了组成成员的组织类型和地理邻近性。团队构成的多样性和跨国范围凸显了国防高级研究计划局寻求创新解决方案的宽口径方法。缩写:FFRDC,联邦资助的研发中心。
