
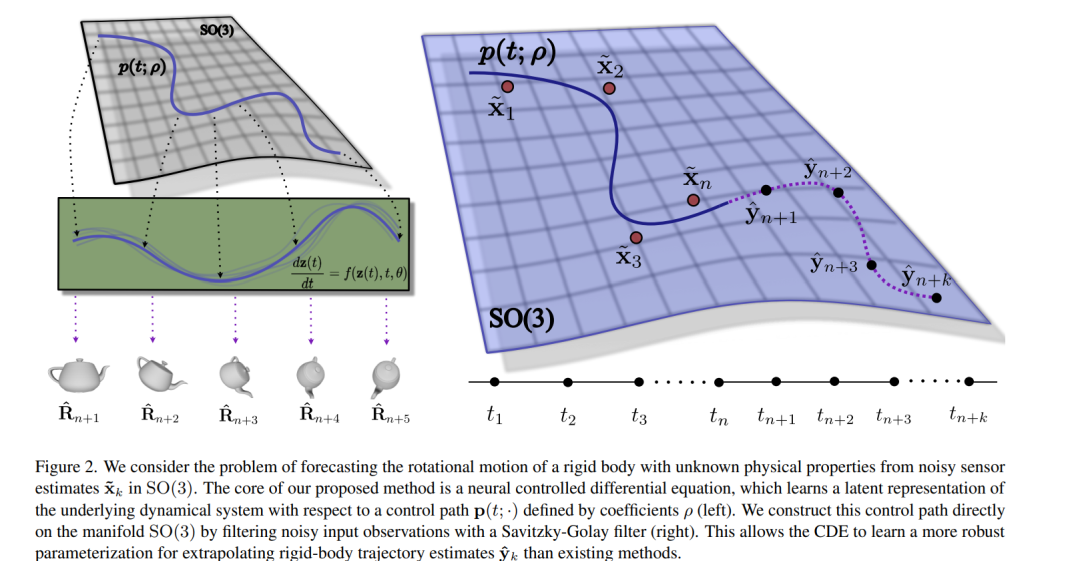
在计算机视觉中,对运动物体旋转进行建模是一项基础任务,但 SO(3) 上的外推(extrapolation)仍面临诸多挑战:(1)诸如转动惯量等未知量会使动力学建模变得复杂;(2)外部力和力矩的存在可能导致非保守(non-conservative)运动学;(3)在观测稀疏且含噪的条件下估计随时间演化的状态轨迹需要具备鲁棒性。 我们提出了一种在三维旋转群(SO(3)流形上,对含噪姿态估计轨迹进行物理与几何意义统一建模的方法,该方法结合 SO(3) Savitzky–Golay 路径与神经控制微分方程(Neural Controlled Differential Equations, Neural CDEs)。现有外推方法通常依赖能量守恒或恒速假设,因此在存在非保守力的真实场景中适用性有限。相比之下,我们的方法对能量与动量守恒无假设,并且对输入噪声具有鲁棒性,因此适用于复杂的非惯性系统。 该方法可作为模块轻松集成到现有管线中,并且能够很好地泛化到物理参数未知的轨迹。通过在训练阶段从含噪状态中学习近似物体动力学,我们的模型在仿真和多种真实环境中都能实现鲁棒的外推能力。相关代码可在此处获取。
成为VIP会员查看完整内容
相关内容
Arxiv
215+阅读 · 2023年4月7日
Arxiv
17+阅读 · 2017年12月12日

相关VIP内容
相关资讯
相关论文
Arxiv
215+阅读 · 2023年4月7日
Arxiv
17+阅读 · 2017年12月12日